Use this text to prompt LLM models with context about this codebase which includes function headers and docs.
# LLM Prompt
The following content includes function signatures and docstrings from Python source files, as well as relevant Markdown documentation. Each section is labeled by its relative file path. Use this as context to understand the project structure, purpose, and functionality.
## Python Section
### File: utils.py
def merge_vectors(input_vectors, merged_vector_path, method, debug_logs, create_name_attribute):
"""Merge multiple vector files using the specified geometric method.
Args:
input_vectors (str | List[str]): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.gpkg", "/input/folder" (assumes *.gpkg), ["/input/one.tif", "/input/two.tif"].
merged_vector_path (str): Path to save merged output.
method (Literal["intersection", "union", "keep"]): Merge strategy.
debug_logs (bool): If True, print debug information.
create_name_attribute (Optional[Tuple[str, str]]): Tuple of (field_name, separator) to add a combined name field.
Returns:
None"""
def align_rasters(input_images, output_images):
"""Aligns multiple rasters to a common resolution and grid using specified resampling.
Args:
input_images (str | List[str], required): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.tif", "/input/folder" (assumes *.tif), ["/input/one.tif", "/input/two.tif"].
output_images (str | List[str], required): Defines output files from a template path, folder, or list of paths (with the same length as the input). Specify like: "/input/files/$.tif", "/input/folder" (assumes $_Local.tif), ["/input/one.tif", "/input/two.tif"].
resampling_method: "nearest" | "bilinear" | "cubic".
tap: If True, snap output extent to target-aligned pixels (GDAL -tap behavior).
resolution: "highest" (min px size), "average", or "lowest" (max px size).
window_size: Tile size for output blocks; used for GTiff creation options.
debug_logs: Verbose logging.
cache: Cache for processing.
image_threads: Python-level parallelism over images (e.g., ("process", 4)).
io_threads: Sets GDAL_NUM_THREADS for internal GDAL multithreading (int or str).
tile_threads: Sets GTiff/COG writer NUM_THREADS and Warp’s NUM_THREADS (int or str).
Returns:
List[str]: Paths to the locally adjusted output raster images."""
def _align_process_image(image_name, in_path, out_path, target_res, resampling_method, tap, window_size, tile_threads, debug_logs):
"""Align a single raster to a target resolution and grid using GDAL Warp.
Args:
image_name (str): Identifier for the raster, used for logging.
in_path (str): Path to the input raster file.
out_path (str): Path where the aligned raster will be written.
target_res (Tuple[float, float]): Target pixel resolution as ``(xres, yres)``.
resampling_method (Literal["nearest", "bilinear", "cubic"]): Resampling algorithm.
tap (bool): If True, snaps bounds to target-aligned pixels (GDAL -tap behavior).
window_size (int): Tile size in pixels for output blocks (BLOCKXSIZE/BLOCKYSIZE).
tile_threads (Optional[int | str]): Number of threads for GTiff/COG writer and Warp tile processing. If None, defaults to GDAL's internal behavior.
debug_logs (bool): If True, print debug information during processing.
Returns:
None"""
def compute_resolution(paths, strategy):
def merge_rasters(input_images, output_image_path):
"""Merges multiple rasters into a single output.
Args:
input_images (str | List[str], required): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.tif", "/input/folder" (assumes *.tif), ["/input/one.tif", "/input/two.tif"].
output_image_path (str): Path to output mosaic.
cache (int | Tuple[int, str] | None, optional): Controls GDAL cache size. Examples: 2048 (MB), (2, "GB"). Set None to use GDAL’s default. Applied via GDAL_CACHEMAX. window_parallel_workers (Tuple[Literal["process"], Literal["cpu"] | int] | None = None): Parallelization strategy at the window level within each image. Same format as image_parallel_workers. Threads are not supported. Set to None to disable.
io_threads (Literal["cpu"] | int | None): Parallelism for IO operations. "cpu" to get number of cores, int to assign number, and None to disable io level parallelism.
tile_threads (Literal["cpu"] | int | None): "cpu" to get number of cores, int to assign number, and None to disable tile level parallelism.
debug_logs (bool, optional): If True, prints progress. Defaults to False.
output_dtype (str | None, optional): Data type for output rasters. Defaults to input image dtype.
custom_nodata_value (float | int | None, optional): Overrides detected NoData value. Defaults to None.
resolution ("highest" | "average" | "lowest", optional): Strategy for computing merge resolution.
window_size (int | None): Tile size for processing tiles. Defaults to None.
build_overviews (bool, optional): If True, computes overviews. Defaults to False.
Returns:
str: Path of the merged raster."""
def mask_rasters(input_images, output_images, vector_mask, window_size, debug_logs, cache, image_threads, io_threads, tile_threads, include_touched_pixels, custom_nodata_value):
"""Applies a vector-based mask to one or more rasters using GDAL Warp.
Args:
input_images (str | List[str], required): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.tif", "/input/folder" (assumes *.tif), ["/input/one.tif", "/input/two.tif"].
output_images (str | List[str], required): Defines output files from a template path, folder, or list of paths (with the same length as the input). Specify like: "/input/files/$.tif", "/input/folder" (assumes $_Local.tif), ["/input/one.tif", "/input/two.tif"].
vector_mask (Universal.VectorMask, optional): Tuple ('include'|'exclude', vector_path, optional field name).
window_size (int | None): Tile size for processing tiles. Defaults to None.
debug_logs (bool, optional): If True, prints progress. Defaults to False.
cache (int | Tuple[int, str] | None, optional): Controls GDAL cache size. Examples: 2048 (MB), (2, "GB"). Set None to use GDAL’s default. Applied via GDAL_CACHEMAX. window_parallel_workers (Tuple[Literal["process"], Literal["cpu"] | int] | None = None): Parallelization strategy at the window level within each image. Same format as image_parallel_workers. Threads are not supported. Set to None to disable.
image_threads (Literal["cpu"] | int | None): Parallelism for per-image operations. "cpu" to get number of cores, int to assign number, and None to disable image level parallelism.
io_threads (Literal["cpu"] | int | None): Parallelism for IO operations. "cpu" to get number of cores, int to assign number, and None to disable io level parallelism.
tile_threads (Literal["cpu"] | int | None): "cpu" to get number of cores, int to assign number, and None to disable tile level parallelism.
include_touched_pixels (bool, optional): If True, uses all touched pixels for cutline mask.
custom_nodata_value (float | int | None, optional): Overrides detected NoData value. Defaults to None.
Returns:
list: Output image paths after masking."""
def _mask_raster_process_image(input_image_path, output_image_path, image_name, mode, cutline_path, field_given, debug_logs, include_touched_pixels, custom_nodata_value, tile_threads, tile_thread_on):
"""Applies a GDAL Warp mask to a single image using cutline and nodata configuration.
Args:
input_image_path (str): Path to the input raster.
output_image_path (str): Path to the output masked raster.
image_name (str): Short name for logging/debugging.
mode (str | None): Weather to "include" or "exclude".
cutline_path (str | None): Path to the cutline.
field_given (bool): If a filter field was provided.
debug_logs (bool): If True, prints processing information.
include_touched_pixels (bool): If True, enables CUTLINE_ALL_TOUCHED for Warp.
custom_nodata_value (Universal.CustomNodataValue): Nodata value for masked-out pixels.
tile_threads (int | str | None): Number of threads for Warp block parallelism.
tile_thread_on (bool): Whether tile-level multithreading is enabled.
Returns:
None"""
def _prepare_cutline_sources(vector_mask, image_names, debug_logs):
"""Returns: (mode, per_image_path_or_None, original_vector_path, field_given)
- If field is given: dict[image_name] -> '/vsimem/.geojson' or None if no match
- If no field: returns None dict, and you should pass the original vector as-is."""
def _create_masked_vrts(input_image_path_pairs):
def _set_gdal_cache(cache, debug_logs):
def _set_gdal_workers(io_threads, debug_logs):
def _resolve_gdal_dtype(override_dtype, input_image_path, debug_logs):
"""Resolve a valid GDAL data type string or image path for output.
Args:
override_dtype (str | None): Desired GDAL dtype name (e.g., "UInt16"). If None, falls back to the dtype of the input image.
input_image_path (str): Path to the input raster for fallback.
debug_logs (bool): If True, prints debug information.
Returns:
str: GDAL data type name (e.g., "Byte", "UInt16", "Float32")."""
def _resolve_window_size(window_size, input_image_path, debug_logs):
"""Resolve the output tile size (window size) for processing.
Args:
window_size (int | None): Desired tile size. If None, fall back to the block size of the input raster (or full image size if untiled).
input_image_path (str): Path to the input raster for fallback.
debug_logs: bool: If True, prints debug information.
Returns:
int: Tile size in pixels (square, width == height)."""
def _gdal_dtype_str_to_enum(s, default):
def _gdal_dtype_enum_to_name(dt):
def _get_gdal_bounds(path):
"""Compute spatial bounds of a raster.
Args:
path (str): Path to the raster file.
Returns:
tuple[float, float, float, float]: (min_x, min_y, max_x, max_y) bounds in dataset CRS."""
def _get_valid_count(band, approx_ok, force):
"""Get the valid pixel count of a raster band.
Args:
band (gdal.Band): Raster band to compute stats for.
approx_ok (bool): Allow approximate statistics (fast, may be inaccurate).
force (bool): If True, force computation if stats are not cached.
Returns:
valid_count"""
def compute_overviews(input_images_paths):
"""Compute and attach GDAL overviews for one or more raster images.
Args:
input_images_paths (str | List[str], required): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.tif", "/input/folder" (assumes *.tif), ["/input/one.tif", "/input/two.tif"].
output_image_paths (str | List[str] | None): Defines output files as None to update input images or from a template path, folder, or list of paths (with the same length as the input). Specify like: "/input/files/$.tif", "/input/folder" (assumes $_Global.tif), ["/input/one.tif", "/input/two.tif"].
window_scales: Overview decimation factors (default: (2, 4, 8, 16, 32)).
cache: GDAL cache size configuration.
image_threads: Number of parallel workers for image-level processing.
io_threads: GDAL IO worker configuration.
tile_threads: GDAL internal threads for overview computation.
debug_logs: Enable verbose logging.
Returns:
List[str]: Paths of images that received overviews."""
def _process_image_overview(path):
def _copy_files_if_needed(src_paths, dst_paths):
"""Copy src to dst."""
### File: handlers.py
def _resolve_paths(mode, input):
"""Resolves a list of input based on the mode and input format.
Args:
mode (Literal["search", "create", "match", "name"]): Type of operation to perform.
input (str | List[str]): Either a list of file input or a folder/template string.
kwargs (dict, optional): Additional keyword arguments passed to the resolved function.
Returns:
List[str]: List of resolved input."""
def search_paths(search_pattern):
"""Search for files using a glob pattern, or a folder with a default file pattern.
Args:
search_pattern (str, required): Defines input files from a glob path or folder. Specify like: "/input/files/*.tif" or "/input/folder" (while passing default_file_pattern like: '*.tif')
default_file_pattern (str, optional): Used when `pattern` is a directory. If not set and `pattern` is a folder, raises an error.
recursive (bool, optional): Whether to search recursively.
match_to_paths (Tuple[List[str], str], optional): Matches input files to a reference list using a regex.
debug_logs (bool, optional): Whether to print matched paths.
Returns:
List[str]: Sorted list of matched file paths.
Raises:
ValueError: If `search_pattern` is a directory and `default_file_pattern` is not provided."""
def create_paths(template_pattern, paths_or_bases):
"""Create output paths using a filename template_pattern and a list of reference paths or names.
Args:
template_pattern (str, required): Defines output files from a glob path or folder to match input paths or names. Specify like: "/input/files/$.tif" or "/input/folder" (while passing default_file_pattern like: '$.tif')
paths_or_bases (List[str]): List of full paths or base names to derive the replace_symbol from.
default_file_pattern (str, optional): Used if `template_pattern` is a directory.
debug_logs (bool): Whether to print the created paths.
replace_symbol (str): Placeholder symbol in the template to replace with base names.
create_folders (bool): Whether to create output folders if they don't exist.
Returns:
List[str]: List of constructed file paths.
Raises:
ValueError: If `template_pattern` is a directory and `default_file_pattern` is not provided."""
def match_paths(input_match_paths, reference_paths, match_regex, debug_logs):
"""Match `reference_paths` to `input_match_paths` using a regex applied to the basenames of `input_match_paths`. The extracted key must be a substring of the reference filename.
Args:
input_match_paths (List[str]): List of candidate paths to extract keys from.
reference_paths (List[str]): List of reference paths to align to.
match_regex (str): Regex applied to basenames of input_match_paths to extract a key to match via *inclusion* in reference_paths (e.g. "(.*)_LocalMatch\.gpkg$" (without one of the backslashes)).
debug_logs (bool): If True, print matched and unmatched file basenames.
Returns:
List[Optional[str]]: A list the same length as `reference_paths` where each
element is the matched path from `input_match_paths` or None.
Raises:
ValueError: If output list length does not match reference_paths length."""
def _check_raster_requirements(input_image_paths, debug_logs, check_geotransform, check_crs, check_bands, check_nodata, check_resolution):
"""Validates a list of raster image paths to ensure they are compatible for processing.
Args:
input_image_paths (list[str]): Paths to input raster images.
debug_logs (bool): If True, prints debug messages.
check_geotransform (bool): Check that all images have a valid geotransform.
check_crs (bool): Check that all images have the same CRS.
check_bands (bool): Check that all images have the same number of bands.
check_nodata (bool): Check that all images have the same nodata values per band.
check_resolution (bool): Check that all images have the same resolution.
Returns:
bool: True if all checks pass.
Raises:
ValueError: If any check fails."""
def _resolve_nodata_value(image_path, custom_nodata_value):
"""Get the NoData value for a raster.
Args:
image_path (str): Path to the raster image.
custom_nodata_value (float | int | None, optional): If provided, overrides the image's NoData.
Returns:
float | None: The chosen NoData value."""
### File: chain.py
def pipeline(shared_input_images, shared_output_image_path):
"""Run the standard spectral matching mosaic workflow as a single pipeline.
The default matching order is: global matching -> local matching. Override
this with ``matching_order`` to run the matching stages in a different
sequence or omit one of them entirely.
Matching stages are controlled by ``matching_order``. Intermediate outputs default to a temporary directory that is created automatically unless ``shared_temp_dir`` is provided. Set``delete_temp_dir=True`` to remove the temp directory after processing."""
def _resolve_auto_shared_settings():
def _resolve_auto_cache_gb():
def _get_total_memory_bytes():
### File: cli.py
def _cli_version():
def _build_cli():
def main():
### File: statistics.py
def compare_image_spectral_profiles_pairs(image_groups_dict, output_figure_path, title, xlabel, ylabel, line_width, estimate_stats):
"""Plots paired spectral profiles for before-and-after image comparisons.
Args:
image_groups_dict (dict): Mapping of labels to image path pairs (before, after):
{'Image A': [
'/image/before/a.tif',
'image/after/a.tif'
],
'Image B': [
'/image/before/b.tif',
'/image/after/b.tif'
]}
output_figure_path (str): Path to save the resulting comparison figure.
title (str): Title of the plot.
xlabel (str): X-axis label.
ylabel (str): Y-axis label.
line_width (float, optional): Width of the spectral profiles lines. Default is 1.
estimate_stats (bool, optional): Whether to estimate band statistics. Default is True.
Outputs:
Saves a spectral comparison plot showing pre- and post-processing profiles."""
def compare_spatial_spectral_difference_band_average(input_images, output_figure_path, title, diff_label, subtitle, scale):
"""Computes and visualizes the mean per-pixel spectral difference between two coregistered, equal-size images.
Args:
input_images (list): List of two image file paths [before, after].
output_figure_path (str): Path to save the resulting difference image (PNG).
title (str): Title for the plot.
diff_label (str): Label for the colorbar.
subtitle (str): Subtitle text shown below the image.
scale (tuple, optional): Tuple (vmin, vmax) to fix the color scale. Centered at 0.
Raises:
ValueError: If the input list doesn't contain exactly two image paths, or shapes mismatch."""
def compare_before_after_all_images(input_images_1, input_images_2, output_figure_path, title, ylabel_1, ylabel_2, image_names):
"""Creates a two-row image grid to compare before-and-after raster pairs with consistent per-row contrast stretching. Each column shows a pair of aligned images with transparent nodata. Supports 1- and 3-band rasters.
Args:
input_images_1 (list): List of file paths to the "before" images (top row).
input_images_2 (list): List of file paths to the "after" images (bottom row).
output_figure_path (str): Destination path to save the output PNG figure.
title (str): Title of the entire figure.
ylabel_1 (str): Y-axis label for the top row.
ylabel_2 (str): Y-axis label for the bottom row.
image_names (list, optional): List of image names to use as column titles. Must match the number of image pairs.
Raises:
AssertionError: If input lists have mismatched lengths or if `image_names` does not match image count.
Output:
Saves a PNG file with the comparison figure."""
def read_as_3band(ds):
def compute_row_stretch(paths):
### File: types_and_validation.py
def _validate_threads(x, name):
def _validate():
def _validate_match():
def _validate_global_regression():
def _validate_local_block_adjustment():
def _validate_shared_pipeline():
def _validate_method_choice():
def _validate_align_rasters():
def _validate_mask_rasters():
def _validate_merge_rasters():
def _validate_voronoi_center_seamline():
### File: utils_multiprocessing.py
def _choose_context(prefer_fork):
"""Chooses the most appropriate multiprocessing context based on platform and preference.
Args:
prefer_fork (bool): If True, prefers "fork" context where available; default is True.
Returns:
mp.context.BaseContext: Selected multiprocessing context ("fork", "forkserver", or "spawn")."""
def _resolve_parallel_config(workers):
"""Parses a parallel worker config into execution flags and worker count.
Args:
workers ("cpu" | int | None): Number of workers.
- "cpu" → use os.cpu_count()
- int → use that many workers
- None → disables parallelism
Returns:
Tuple[bool, Optional[int]]:
- Whether to run in parallel,
- Number of workers."""
def _get_executor(backend, max_workers, initializer, initargs):
"""Creates a parallel executor (process or thread) with optional initialization logic.
Args:
backend (str): Execution backend, either "process" or "thread".
max_workers (int): Maximum number of worker processes or threads.
initializer (Callable, optional): Function to initialize worker context.
initargs (tuple, optional): Arguments to pass to the initializer.
Returns:
Executor: An instance of ThreadPoolExecutor or ProcessPoolExecutor.
Raises:
ValueError: If the backend is not "process" or "thread"."""
### File: mask/mask.py
def create_cloud_mask_with_omnicloudmask(input_images, output_images, red_band_index, green_band_index, nir_band_index):
"""Generates cloud masks from input images using OmniCloudMask, with optional downsampling and multiprocessing.
Args:
input_images (str | List[str], required): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.tif", "/input/folder" (assumes *.tif), ["/input/one.tif", "/input/two.tif"].
output_images (str | List[str], required): Defines output files from a template path, folder, or list of paths (with the same length as the input). Specify like: "/input/files/$.tif", "/input/folder" (assumes $_CloudMask.tif), ["/input/one.tif", "/input/two.tif"].
red_band_index (int): Index of red band in the image.
green_band_index (int): Index of green band in the image.
nir_band_index (int): Index of NIR band in the image.
down_sample_m (float, optional): If set, resamples input to this resolution in meters. Recommended to use a target resolution of 10 m or lower.
debug_logs (bool, optional): If True, prints progress and debug info.
image_threads (Literal["cpu"] | int | None): Enables parallel execution. Note: "process" does not work on macOS due to PyTorch MPS limitations.
omnicloud_kwargs (dict | None): Additional arguments forwarded to predict_from_array.
Raises:
Exception: Propagates any error from processing individual images."""
def _process_cloud_mask_image(input_image_path, output_mask_path, red_band_index, green_band_index, nir_band_index, down_sample_m, debug_logs, omnicloud_kwargs):
"""Processes a single image to generate a cloud mask using OmniCloudMask.
Args:
input_image_path (str): Path to input image.
output_mask_path (str): Path to save output mask.
red_band_index (int): Index of red band.
green_band_index (int): Index of green band.
nir_band_index (int): Index of NIR band.
down_sample_m (float): Target resolution (if resampling).
debug_logs (bool): If True, print progress info.
omnicloud_kwargs (dict | None): Passed to predict_from_array.
Raises:
Exception: If any step in reading, prediction, or writing fails."""
def band_math(input_images, output_images, threshold_math):
"""Applies a thresholding operation to input raster images using a mathematical expression string.
Args:
input_images (str | List[str], required): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.tif", "/input/folder" (assumes *.tif), ["/input/one.tif", "/input/two.tif"].
output_images (str | List[str], required): Defines output files from a template path, folder, or list of paths (with the same length as the input). Specify like: "/input/files/$.tif", "/input/folder" (assumes $_Threshold.tif), ["/input/one.tif", "/input/two.tif"].
threshold_math (str): A muparser‑compatible expression applied to the raster bands, see https://github.com/beltoforion/muparser. Bands are referenced as B1, B2, … and you can use C‑style comparison and logical operators (such as >, <, >=, <=, ==, !=, &&, ||, !) along with parentheses and ternary ? : constructs—for example, ((B1 > 5) && (B2 < 10)) ? 1 : 0. Percentile‑based thresholds are supported: write 5%B1 to substitute the 5th‑percentile value of band 1 into the expression before evaluation.
debug_logs (bool, optional): If True, prints debug messages.
custom_nodata_value (float | int | None, optional): Override the dataset's nodata value.
cache (float | None): Controls GDAL cache size in GB. Defaults to preset cache size. Applied via GDAL_CACHEMAX.
image_threads (Literal["cpu"] | int | None): Parallelism for per-image operations. "cpu" to get number of cores, int to assign number, and None to disable image level parallelism.
io_threads (Literal["cpu"] | int | None): Parallelism for IO operations. "cpu" to get number of cores, int to assign number, and None to disable io level parallelism.
tile_threads (Literal["cpu"] | int | None): "cpu" to get number of cores, int to assign number, and None to disable tile level parallelism.
window_size (WindowSize, optional): Window tiling strategy for memory-efficient processing.
custom_output_dtype (CustomOutputDtype, optional): Output data type override.
calculation_dtype (CalculationDtype, optional): Internal computation dtype.
Returns:
List[str]: Paths to the thresholded output images."""
def _band_math_process_image(input_image_path, output_image_path, name, threshold_math, debug_logs, nodata_value, tile_threads_on, tile_thread_workers, window_size, output_dtype, calculation_dtype):
"""Processes a single input raster image using a threshold expression and writes the result to disk.
Args:
input_image_path (str): Path to input raster image.
output_image_path (str): Path to save the output thresholded image.
name (str): Image name for worker context.
threshold_math (str): Expression string to evaluate pixel-wise conditions.
debug_logs (bool): Enable debug logging.
nodata_value (float | int | None): Value considered as nodata.
tile_threads_on (bool): Enable GDAL multithreaded tiling if ``True``.
tile_thread_workers (int): Number of worker threads for GDAL tiling.
window_size: Window tiling size for memory efficiency.
output_dtype: Output raster data type.
calculation_dtype: Data type used for internal calculations.
Returns:
None"""
def _calculate_threshold_from_percent(input_image_path, threshold, band_index, debug_logs, nodata_value, bins, estimate_statistics):
"""Compute a percentile value for a raster band using GDAL.
Args:
input_image_path: Path to the input raster file.
threshold: Desired percentile (e.g., 95 for the 95th percentile).
band_index: 1-based index of the band to process.
debug_logs: If True, print debug information.
nodata_value: Value to be treated as nodata.
bins: Number of histogram bins (default is 1000).
estimate_statistics: If True, allow GDAL to approximate min/max and histogram for speed.
Returns:
float: The pixel value corresponding to the requested percentile."""
def replace_percent_with_threshold(match):
### File: mask/utils_mask.py
def process_raster_values_to_vector_polygons(input_images, output_vectors):
"""Converts raster values into vector polygons based on an expression and optional filtering logic.
Args:
input_images (str | List[str], required): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.tif", "/input/folder" (assumes *.tif), ["/input/one.tif", "/input/two.tif"].
output_vectors (str | List[str], required): Defines output files from a template path, folder, or list of paths (with the same length as the input). Specify like: "/input/files/$.gpkg", "/input/folder" (assumes $_Vectorized.gpkg), ["/input/one.gpkg", "/input/two.gpkg"].
extraction_expression (str): A muparser‑compatible expression applied to the raster bands, see https://github.com/beltoforion/muparser. Bands are referenced as B1, B2, … and you can use C‑style comparison and logical operators (such as >, <, >=, <=, ==, !=, &&, ||, !) along with parentheses and ternary ? : constructs—for example, ((B1 > 5) && (B2 < 10)) ? 1 : 0. Percentile‑based thresholds are supported: write 5%B1 to substitute the 5th‑percentile value of band 1 into the expression before evaluation.
custom_nodata_value (Universal.CustomNodataValue, optional): Custom NoData value to override the default from the raster metadata.
custom_output_dtype (Universal.CustomOutputDtype, optional): Desired output data type. If not set, defaults to raster’s dtype.
cache (float | None): Controls GDAL cache size in GB. Defaults to preset cache size. Applied via GDAL_CACHEMAX.
image_threads (Literal["cpu"] | int | None): Parallelism for per-image operations. "cpu" to get number of cores, int to assign number, and None to disable image level parallelism.
io_threads (Literal["cpu"] | int | None): Parallelism for IO operations. "cpu" to get number of cores, int to assign number, and None to disable io level parallelism.
tile_threads (Literal["cpu"] | int | None): "cpu" to get number of cores, int to assign number, and None to disable tile level parallelism.
debug_logs (Universal.DebugLogs, optional): Whether to print debug logs to the console.
filter_by_polygon_size (str, optional): Area filter for resulting polygons. Can be a number (e.g., ">100") or percentile (e.g., ">95%").
polygon_buffer (float, optional): Distance in coordinate units to buffer the resulting polygons. Default is 0.
value_mapping (dict, optional): Mapping from original raster values to new values. Use `None` to convert to NoData.
estimate_statistics (bool, optional): Whether to estimate statistics for percentile thresholds. Defaults to True."""
def _process_image_to_polygons(input_image_path, output_vector_path, extraction_expression, filter_by_polygon_size, polygon_buffer, value_mapping, custom_nodata_value, debug_logs, estimate_statistics, tile_thread_on, tile_thread_workers):
"""Processes a single raster file and extracts polygons based on logical expressions and optional filters.
Args:
input_image_path (str): Path to the input raster image.
output_vector_path (str): Output file path for the resulting vector file (GeoPackage format).
extraction_expression (str): Logical expression using band indices (e.g., "b1 > 5 & b2 < 10").
filter_by_polygon_size (str): Area filter for polygons. Supports direct comparisons (">100") or percentiles ("90%").
polygon_buffer (float): Amount of buffer to apply to polygons in projection units.
value_mapping (dict): Dictionary mapping original raster values to new ones. Set value to `None` to mark as NoData.
custom_nodata_value: Custom NoData value to use during processing.
debug_logs (bool): Whether to print debug logging information.
estimate_statistics (bool): Whether to estimate statistics for percentile thresholds.
tile_thread_on (bool): Whether to use tiled processing.
tile_thread_workers (int): Number of worker threads to use for tiled processing."""
def _sub(m):
def _apply_mapping_feat(feat):
def _area_ok(geom_area, areas):
### File: geometric_correction/geometric_correction.py
def geometric_correction(reference_overlap_vrt, sensed_overlap_vrt, output_raster_path):
"""Geometrically correct an overlap raster using conjugate points and return the
corrected raster path plus the matched point pairs used to estimate the warp."""
def _extract_conjugate_point_pairs(ref_vrt, sensed_vrt, valid_mask, feature_method):
def _filter_point_pairs(point_pairs, debug_logs):
def _drop_duplicate_point_pairs(point_pairs):
def _keep_affine_inlier_pairs(point_pairs):
def _read_mask(mask_path):
def _build_overlap_valid_mask(ref_ds, sensed_ds):
def _read_uint8_gray(raster_path, valid_mask):
def _pixel_to_map_coords(gt, row, col):
def _get_bounds_from_gt(gt, width, height):
def _infer_gdal_format(output_path):
def _get_creation_options(format_name):
### File: match/global_regression.py
def _solve_global_model(num_bands, num_total, all_image_names, included_names, input_image_names, all_overlap_stats, all_whole_stats, custom_mean_factor, custom_std_factor, overlapping_pairs, debug_logs, apply_size_weighting):
"""Computes global radiometric normalization parameters (scale and offset) for each image and band using least squares regression.
Args:
num_bands: Number of image bands.
num_total: Total number of images (including loaded).
all_image_names: Ordered list of all image names.
included_names: Subset of images used to constrain the model.
input_image_names: Names of input images to apply normalization to.
all_overlap_stats: Pairwise overlap statistics per band.
all_whole_stats: Whole-image stats (mean, std) per band.
custom_mean_factor: Weight for mean constraints.
custom_std_factor: Weight for std constraints.
overlapping_pairs: Pairs of overlapping images.
debug_logs: If True, prints debug information.
apply_size_weighting (bool): Whether to use the overlap size to weight its influence.
Returns:
np.ndarray: Adjustment parameters of shape (bands, 2 * num_images, 1)."""
def _finalize_pif_whole_stats(all_whole_stats):
def _solve_pif_global_model():
def _apply_adjustments_process_image(tile_thread_on, tile_thread_workers, image_name, input_image_path, output_image_path, scale, offset, num_bands, nodata_val, window_size, output_dtype, calculation_dtype, save_as_cog, debug_logs):
"""Applies per-band linear radiometric adjustments to an image using GDAL VRT metadata and materializes the result as a GeoTIFF or COG. Each band is transformed according to: y = a * x + b, where `a` = scale and `b` = offset.
Args:
tile_thread_on (bool): Enable multithreaded GDAL translation for tile-level work.
tile_thread_workers (int): Number of worker threads if `tile_thread_on=True`.
image_name (str): Basename (no extension) of the input image; used for temporary files.
input_image_path (str): Path to the input image to adjust.
output_image_path (str): Path where the adjusted raster will be written.
scale (np.ndarray): 1D array of per-band scale coefficients (length = num_bands).
offset (np.ndarray): 1D array of per-band offset coefficients (length = num_bands).
num_bands (int): Number of data bands to adjust (alpha not included).
nodata_val (int | float | None): NoData value to assign to output bands, if provided.
window_size: Window size used for tiling (currently not applied at pixel level).
output_dtype (str | None): Desired GDAL output data type (e.g., "UInt16"). If None, preserves source dtype.
calculation_dtype (str | None): Desired GDAL calculation dtype.
save_as_cog (bool): If True, writes output as Cloud-Optimized GeoTIFF (COG); otherwise, writes a standard tiled GeoTIFF.
debug_logs (bool, optional): If True, print detailed logging about the process. Defaults to False.
Returns:
None"""
def _save_adjustments(save_path, input_image_names, all_params, all_whole_stats, all_overlap_stats, num_bands, calculation_dtype):
"""Saves adjustment parameters, whole-image stats, and overlap stats in a nested JSON format.
Args:
save_path (str): Output JSON path.
input_image_names (List[str]): List of input image names.
all_params (np.ndarray): Adjustment parameters, shape (bands, 2 * num_images, 1).
all_whole_stats (dict): Per-image stats (keyed by image name).
all_overlap_stats (dict): Per-pair overlap stats (keyed by image name).
num_bands (int): Number of bands.
calculation_dtype (str): Precision for saving values (e.g., "float32")."""
def _validate_adjustment_model_structure(model):
"""Validates the structure of a loaded adjustment model dictionary.
Ensures that:
- Each top-level key is an image name mapping to a dictionary.
- Each image has 'adjustments' and 'whole_stats' with per-band keys like 'band_0'.
- Each band entry in 'adjustments' contains 'scale' and 'offset'.
- Each band entry in 'whole_stats' contains 'mean', 'std', and 'size'.
- If present, 'overlap_stats' maps to other image names with valid per-band statistics.
The expected model structure is a dictionary with this format:
{
"image_name_1": {
"adjustments": {
"band_0": {"scale": float, "offset": float},
"band_1": {"scale": float, "offset": float},
...
},
"whole_stats": {
"band_0": {"mean": float, "std": float, "size": int},
"band_1": {"mean": float, "std": float, "size": int},
...
},
"overlap_stats": {
"image_name_2": {
"band_0": {"mean": float, "std": float, "size": int},
"band_1": {"mean": float, "std": float, "size": int},
...
},
...
}
},
...
}
- Keys are image basenames (without extension).
- Band keys are of the form "band_0", "band_1", etc.
- All numerical values are stored as floats (except 'size', which is an int).
Args:
model (dict): Parsed JSON adjustment model.
Raises:
ValueError: If any structural issues or missing keys are detected."""
def _print_constraint_system(constraint_matrix, adjustment_params, observed_values_vector, overlap_pairs, image_names_with_id):
"""Prints the constraint matrix system with labeled rows and columns for debugging regression inputs.
Args:
constraint_matrix (ndarray): Coefficient matrix used in the regression system.
adjustment_params (ndarray): Solved adjustment parameters (regression output).
observed_values_vector (ndarray): Target values in the regression system.
overlap_pairs (tuple): Pairs of overlapping image indices used in constraints.
image_names_with_id (list of tuple): List of (ID, name) pairs corresponding to each image's position in the system.
Returns:
None"""
def _find_overlaps(image_bounds_dict):
"""Finds all pairs of image names with overlapping spatial bounds.
Args:
image_bounds_dict: Map of image name -> (minx, miny, maxx, maxy).
Returns:
Tuple of (name_i, name_j) pairs with overlapping extents."""
def _overlap_stats_process_image(tile_thread_on, tile_thread_workers, num_bands, input_image_path_i, input_image_path_j, name_i, name_j, bound_i, bound_j, estimate_stats, debug_logs):
"""Computes per-band overlap statistics between two images using alpha masks, without VRT recursion.
Args:
tile_thread_on (bool): Enable multithreaded GDAL warp/translate operations for per-tile work.
tile_thread_workers (int): Number of worker threads when `tile_thread_on=True`.
num_bands (int): Number of data bands to analyze.
input_image_path_i (str): Path to image I.
input_image_path_j (str): Path to image J.
name_i (str): Basename (no extension) for image I; used as a key in outputs.
name_j (str): Basename (no extension) for image J; used as a key in outputs.
bound_i: (minx, miny, maxx, maxy) bounds for image I (dataset CRS).
bound_j: (minx, miny, maxx, maxy) bounds for image J (dataset CRS).
estimate_stats (bool): If True, use GDAL’s approximate statistics; if False, use exact.
debug_logs (bool, optional): If True, print progress and intermediate details. Defaults to False.
Returns:
Dict[str, Dict[str, Dict[int, Dict[str, float]]]]: Nested mapping of overlap stats:
{
name_i: {
name_j: {
band_index: {"mean": float, "std": float, "size": int}, # band_index is 0-based
...
}
},
name_j: {
name_i: { ... } # symmetric entries
}
}"""
def _whole_stats_process_image(tile_thread_on, tile_thread_worker, input_image_path, num_bands, image_name, estimate_stats, debug_logs):
"""Computes whole-image statistics (mean, standard deviation, valid pixel count) for each band of a masked raster.
Args:
tile_thread_on (bool): Enable multithreaded GDAL operations for tile-level work.
tile_thread_worker (int): Number of worker threads if `tile_thread_on=True`.
input_image_path (str): Path to an input raster (VRT with alpha/nodata applied).
num_bands (int): Number of data bands to compute stats for (alpha excluded).
image_name (str): Basename (no extension) of the image; used as key in output.
estimate_stats (bool): If True, use GDAL’s approximate statistics; if False, compute exact statistics.
debug_logs (bool): If True, print detailed per-band statistics.
Returns:
Dict[str, Dict[int, Dict[str, float]]]: Mapping of image name to per-band stats:
{
image_name: {
band_index: {
"mean": float, # band mean
"std": float, # band standard deviation
"size": int # count of valid pixels (shared across bands)
},
...
}
}"""
def _make_stats_vrt(base_vrt, out_vrt):
### File: match/local_block_adjustment.py
def _get_pre_computed_block_maps(load_block_maps, calculation_dtype, debug_logs):
"""Load pre-computed block mean maps from files.
Args:
load_block_maps (Tuple[str, List[str]] | Tuple[str, None] | Tuple[None, List[str]]):
- Tuple[str, List[str]]: Load both reference and local block maps.
- Tuple[str, None]: Load only the reference block map.
- Tuple[None, List[str]]: Load only the local block maps.
calculation_dtype (str): Numpy dtype to use for reading.
debug_logs (bool): To print debug statements or not.
Returns:
Tuple[
dict[str, np.ndarray], # block_local_means
Optional[np.ndarray], # block_reference_mean
Optional[int], # num_row
Optional[int], # num_col
Optional[Tuple[float, float, float, float]] # bounds_canvas_coords
]"""
def _get_bounding_rect_images_block_space(block_local_means):
"""Compute block-space bounding rectangles for each image based on valid block values.
Args:
block_local_means (dict[str, np.ndarray]): Per-image block means
with shape (num_row, num_col, num_bands).
Returns:
dict[str, tuple[int, int, int, int]]: Each entry maps image name to
(min_row, min_col, max_row, max_col)."""
def _compute_reference_blocks(block_local_means, calculation_dtype):
"""Computes reference block means across images by averaging non-NaN local block means.
Args:
block_local_means (dict[str, np.ndarray]): Per-image block mean arrays.
calculation_dtype (str): Numpy dtype for output array.
Returns:
np.ndarray: Reference block map of shape (num_row, num_col, num_bands)"""
def _apply_adjustment_process_image(name, img_path, out_path, num_bands, block_reference_mean, block_local_mean, bounds_canvas_coords, window_size, num_row, num_col, nodata_val, alpha, correction_method, calculation_dtype, output_dtype, debug_logs, tile_thread_on, tile_thread_workers, save_as_cog, estimate_stats):
"""Apply local radiometric adjustment (linear or gamma) to a raster image using block-based reference and local mean surfaces. Builds parameter surfaces as rasters, warps them to the image grid, and creates a VRT with per-pixel expressions, then materializes the output as GTiff or COG.
Args:
name (str): Identifier for the image (basename, no extension).
img_path (str): Path to the input raster image.
out_path (str): Path where the adjusted raster will be written.
num_bands (int): Number of spectral bands to process.
block_reference_mean (np.ndarray): Block-level reference mean values per band.
block_local_mean (np.ndarray): Block-level local mean values per band.
bounds_canvas_coords (tuple): Geographic bounds of the image canvas (xmin, ymin, xmax, ymax).
window_size (int | None): Output block size used for tiling.
num_row (int): Number of block rows.
num_col (int): Number of block columns.
nodata_val (float): NoData value to assign to output bands.
alpha (float): Scaling factor applied in gamma correction formula.
correction_method (Literal["gamma", "linear"]): Radiometric correction method.
calculation_dtype (str): Intermediate calculation data type (GDAL type string).
output_dtype: GDAL output data type (enum or string).
debug_logs (bool): If True, print debug information.
tile_thread_on (bool): If True, enable multithreaded warp/translate operations.
tile_thread_workers (int): Number of worker threads if `tile_thread_on=True`.
save_as_cog (bool): If True, write output as Cloud-Optimized GeoTIFF (COG).
Returns:
None"""
def _get_bounding_rectangle(images):
"""Return the combined extent (minx, miny, maxx, maxy) of rasters. Accepts a list of file paths, single path, or single GDAL dataset.
Args:
images (List[str] | gdal.Dataset): List of raster file paths, single path, or single GDAL dataset.
Returns:
Tuple[float, float, float, float]: (min_x, min_y, max_x, max_y) of the combined extent."""
def _compute_mosaic_coefficient_of_variation(image_paths, nodata_value, reference_std, reference_mean, base_block_size, band_index, estimate_statistics, debug_logs):
"""Estimates block size for local adjustment using the coefficient of variation across input images.
Args:
image_paths (List[str]): List of input raster file paths.
nodata_value (float): Value representing NoData in the input rasters.
reference_std (float, optional): Reference standard deviation for comparison. Defaults to 45.0.
reference_mean (float, optional): Reference mean for comparison. Defaults to 125.0.
base_block_size (Tuple[int, int], optional): Base block size (rows, cols). Defaults to (10, 10).
band_index (int, optional): Band index to use for statistics (1-based). Defaults to 1.
estimate_statistics (bool, optional): If True, estimates statistics for each block. Defaults to True.
debug_logs (bool, optional): If True, print logs.
Returns:
Tuple[int, int]: Estimated block size (rows, cols) adjusted based on coefficient of variation."""
def _calculate_block_process_image(name, image_path, bounds_canvas_coords, num_row, num_col, num_bands, debug_logs, nodata_value, calculation_dtype, tile_thread_on, tile_thread_workers):
"""Compute area-weighted block means over a target grid using GDAL Warp.
Args:
name: Identifier carried through to the return tuple.
image_path: Path to the source raster (VRT/GeoTIFF/etc.).
bounds_canvas_coords: (x_min, y_min, x_max, y_max) in the source CRS (projection taken from `image_path`).
num_row: Output grid height (rows).
num_col: Output grid width (columns).
num_bands: Number of bands to read from the warped raster.
debug_logs: If True, emit progress and NaN counts to stdout.
nodata_value: Source NoData value to treat as invalid (if present).
calculation_dtype: Target NumPy dtype for the output array (e.g., "float32").
tile_thread_on: If True, enable multithreaded warping.
tile_thread_workers: Number of worker threads when `tile_thread_on` is True.
Returns:
Tuple[str, np.ndarray]: `(name, block_mean)` where `block_mean` has shape `(num_row, num_col, num_bands)` and dtype `calculation_dtype`. Cells with no valid input samples are NaN."""
def _get_intersecting_block_window(global_bounds, image_bounds, num_row, num_col):
"""Return the block-window indices and aligned bounds for the portion of the
global block grid that intersects the image bounds."""
def _download_block_map(block_map, bounding_rect, output_image_path, srs, dtype, nodata_value, width, height, write_bands, delete_output):
"""Writes a 3D block map to a raster file, creating or updating specified bands within a target window.
Args:
block_map (np.ndarray): Block data of shape (rows, cols, bands).
bounding_rect (tuple): Spatial extent (minx, miny, maxx, maxy).
output_image_path (str): Path to the output raster file.
srs (str): SRS to save image with.
dtype (str): Data type for output.
nodata_value (float): NoData value to write.
width (int): Full raster width.
height (int): Full raster height.
write_bands (tuple[int] | None): 0-based band indices to write; all if None.
Output:
Writes the `block_map` array to `output_image_path`, either creating a new raster or updating an existing one."""
def _compute_block_size(input_image_array_path, target_blocks_per_image, bounds_canvas_coords):
"""Calculates the number of rows and columns for dividing a bounding rectangle into target-sized blocks.
Args:
input_image_array_path (list): List of image paths to determine total image count.
target_blocks_per_image (int | float): Desired number of blocks per image.
bounds_canvas_coords (tuple): Bounding box covering all images (minx, miny, maxx, maxy).
Returns:
Tuple[int, int]: Number of rows (num_row) and columns (num_col) for the block grid."""
def _smooth_array(input_array, nodata_value, scale_factor):
"""Applies Gaussian smoothing to an array while preserving NoData regions.
Args:
input_array (np.ndarray): 2D array to be smoothed.
nodata_value (Optional[float], optional): Value representing NoData. Treated as NaN during smoothing. Defaults to None.
scale_factor (float, optional): Sigma value for the Gaussian filter. Controls smoothing extent. Defaults to 1.0.
Returns:
np.ndarray: Smoothed array with NoData regions preserved or restored."""
def _write_block_raster(arr2d, path, dtype):
def _warp_to_image_grid(src_path, dst_path):
### File: match/match.py
def _setup_images():
def global_regression(input_images, output_images):
"""Performs global radiometric normalization across overlapping images using least squares regression.
Args:
input_images (str | List[str], required): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.tif", "/input/folder" (assumes *.tif), ["/input/one.tif", "/input/two.tif"].
output_images (str | List[str], required): Defines output files from a template path, folder, or list of paths (with the same length as the input). Specify like: "/input/files/$.tif", "/input/folder" (assumes $_Global.tif), ["/input/one.tif", "/input/two.tif"].
calculation_dtype (str, optional): Precision for internal calculations. Defaults to "float32".
output_dtype (str | None, optional): Data type for output rasters. Defaults to input image dtype.
vector_mask (Tuple[Literal["include", "exclude"], str, Optional[str]] | None): Mask to limit stats calculation to specific areas in the format of a tuple with two or three items: literal "include" or "exclude" the mask area, str path to the vector file, optional str of field name in vector file that *includes* (can be substring) input image name to filter geometry by. Loaded stats won't have this applied to them. The matching solution is still applied to these areas in the output. Defaults to None for no mask.
debug_logs (bool, optional): If True, prints debug info and progress. Defaults to False.
custom_nodata_value (float | int | None, optional): Overrides detected NoData value. Defaults to None.
cache (float | None): Controls GDAL cache size in GB. Defaults to preset cache size. Applied via GDAL_CACHEMAX.
image_threads (Literal["cpu"] | int | None): Parallelism for per-image operations. "cpu" to get number of cores, int to assign number, and None to disable image level parallelism.
io_threads (Literal["cpu"] | int | None): Parallelism for IO operations. "cpu" to get number of cores, int to assign number, and None to disable io level parallelism.
tile_threads (Literal["cpu"] | int | None): "cpu" to get number of cores, int to assign number, and None to disable tile level parallelism.
window_size (int | None): Output image tile size. Defaults to input image tile size.
save_as_cog (bool): If True, saves output as a Cloud-Optimized GeoTIFF using proper band and block order.
estimate_stats (bool): If True, use an estimate algorithm to calculate the mean and sd to increase processing speeds. If False, use the exact algorithm. Defaults to True.
specify_model_images (Tuple[Literal["exclude", "include"], List[str]] | None ): First item in tuples sets weather to 'include' or 'exclude' the listed images from model building statistics. Second item is the list of image names (without their extension) to apply criteria to. For example, if this param is only set to 'include' one image, all other images will be matched to that one image. Defaults to no exclusion.
custom_mean_factor (float, optional): Weight for mean constraints in regression. Defaults to 1.0.
custom_std_factor (float, optional): Weight for standard deviation constraints in regression. Defaults to 1.0.
save_adjustments (str | None, optional): The output path of a .json file to save adjustments parameters. Defaults to not saving.
load_adjustments (str | None, optional): If set, loads saved whole and overlapping statistics only for images that exist in the .json file. Other images will still have their statistics calculated. Defaults to None.
pif_method (Literal["entire", "flood_from_match_points"], optional): Method used to select overlap pixels for the matching solution. Defaults to "entire".
pif_red_band_index (int | None, optional): Index of the red band used for NDVI-based vegetation filtering. Defaults to None.
pif_nir_band_index (int | None, optional): Index of the NIR band used for NDVI-based vegetation filtering. Defaults to None.
pif_vegetation_threshold (float, optional): Vegetation threshold used with NDVI filtering. Defaults to 0.2.
pif_inz_threshold (float, optional): Integrated normalized Z-score threshold used for flood_from_match_points. Defaults to 0.25.
pif_region_radius (int, optional): Radius used to expand matched points into PIF seed areas. Defaults to 5.
pif_max_samples (int | None, optional): Maximum number of PIF samples to keep. Defaults to 100000.
pif_min_samples (int | None, optional): Minimum number of PIF samples required. Defaults to 32.
pif_feature_method (Literal["orb"], optional): Feature matching method used for flood_from_match_points. Defaults to "orb".
pif_save_inz (str | None, optional): Output path to save the INZ raster. If two "$" are given, the first is the main basename and the second is the reference basename. Defaults to None.
build_overviews (bool, optional): If True, computes overviews. Defaults to False.
Returns:
List[str]: Paths to the globally adjusted output raster images."""
def local_block_adjustment(input_images, output_images):
"""Performs local radiometric adjustment on a set of raster images using block-based statistics.
Args:
input_images (str | List[str], required): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.tif", "/input/folder" (assumes *.tif), ["/input/one.tif", "/input/two.tif"].
output_images (str | List[str], required): Defines output files from a template path, folder, or list of paths (with the same length as the input). Specify like: "/input/files/$.tif", "/input/folder" (assumes $_Global.tif), ["/input/one.tif", "/input/two.tif"].
calculation_dtype (str, optional): Precision for internal calculations. Defaults to "float32".
output_dtype (str | None, optional): Data type for output rasters. Defaults to input image dtype.
vector_mask (Tuple[Literal["include", "exclude"], str, Optional[str]] | None): Mask to limit stats calculation to specific areas in the format of a tuple with two or three items: literal "include" or "exclude" the mask area, str path to the vector file, optional str of field name in vector file that *includes* (can be substring) input image name to filter geometry by. Loaded stats won't have this applied to them. The matching solution is still applied to these areas in the output. Defaults to None for no mask.
debug_logs (bool, optional): If True, prints debug info and progress. Defaults to False.
custom_nodata_value (float | int | None, optional): Overrides detected NoData value. Defaults to None.
cache (float | None): Controls GDAL cache size in GB. Defaults to preset cache size. Applied via GDAL_CACHEMAX.
image_threads (Literal["cpu"] | int | None): Parallelism for per-image operations. "cpu" to get number of cores, int to assign number, and None to disable image level parallelism.
io_threads (Literal["cpu"] | int | None): Parallelism for IO operations. "cpu" to get number of cores, int to assign number, and None to disable io level parallelism.
tile_threads (Literal["cpu"] | int | None): "cpu" to get number of cores, int to assign number, and None to disable tile level parallelism.
window_size (int | None): Output image tile size. Defaults to input image tile size.
save_as_cog (bool): If True, saves output as a Cloud-Optimized GeoTIFF using proper band and block order.
number_of_blocks (int | tuple | Literal["coefficient_of_variation"]): int as a target of blocks per image, tuple to set manually set total blocks width and height, coefficient_of_variation to find the number of blocks based on this metric.
alpha (float, optional): Blending factor between reference and local means. Defaults to 1.0.
correction_method (Literal["gamma", "linear", "offset"], optional): Local correction method. Defaults to "gamma". Offset is commended for images with negative values.
save_block_maps (tuple(str, str) | None): If enabled, saves block maps for review, to resume processing later, or to add additional images to the reference map.
- First str is the path to save the global block map.
- Second str is the path to save the local block maps, which must include "$" which will be replaced my the image name (because there are multiple local maps).
load_block_maps (Tuple[str, List[str]] | Tuple[str, None] | Tuple[None, List[str]] | None, optional):
Controls loading of precomputed block maps. Can be one of:
- Tuple[str, List[str]]: Load both reference and local block maps.
- Tuple[str, None]: Load only the reference block map.
- Tuple[None, List[str]]: Load only the local block maps.
- None: Do not load any block maps.
This supports partial or full reuse of precomputed block maps:
- Local block maps will still be computed for each input image that is not linked to a local block map by the images name being *included* in the local block maps name (file name).
- The reference block map will only be calculated (mean of all local blocks) if not set.
- The reference map defines the reference block statistics and the local maps define per-image local block statistics.
- Both reference and local maps must have the same canvas extent and dimensions which will be used to set those values.
override_bounds_canvas_coords (Tuple[float, float, float, float] | None): Manually set (min_x, min_y, max_x, max_y) bounds to override the computed/loaded canvas extent. If you wish to have a larger extent than the current images, you can manually set this, along with setting a fixed number of blocks, to anticipate images will expand beyond the current extent.
build_overviews (bool, optional): If True, computes overviews. Defaults to False.
Returns:
List[str]: Paths to the locally adjusted output raster images."""
### File: seamline/seamline.py
def voronoi(input_images, output_mask):
"""Generates a Voronoi-based seamline mask from edge-matching polygons (EMPs) and writes the result to a vector file.
Args:
input_images (str | List[str], required): Defines input files from a glob path, folder, or list of paths. Specify like: "/input/files/*.tif", "/input/folder" (assumes *.tif), ["/input/one.tif", "/input/two.tif"].
output_mask (str): Output path for the final seamline polygon vector file.
aoi_path (str, optional): Path to an AOI vector file to clip overlapping image polygons; default is None.
vector_mask (Tuple[str, str] | None, optional): Optional polygon source to use instead of extracting EMPs from rasters. The tuple is (vector_path, field_name). For each input image, polygons are selected when the field value is included anywhere in the image name. Matching polygons for the same image are unioned together.
min_point_spacing (float, optional): Minimum spacing between Voronoi seed points; default is 10.
min_cut_length (float, optional): Minimum cutline segment length to retain; default is 0.
debug_logs (Universal.DebugLogs, optional): Enables debug print statements if True; default is False.
image_field_name (str, optional): Name of the attribute field for image ID in output; default is 'image'.
debug_vectors_path (str | None, optional): Optional path to save debug layers (cutlines, intersections).
Outputs:
Saves a polygon seamline layer to `output_mask`, and optionally saves intermediate cutlines to `debug_vectors_path`."""
### File: seamline/voronoi_center_seamline.py
def _load_emp_polygons_from_vector(input_image_paths, input_image_names, vector_mask, debug_logs):
"""Load one polygon footprint per image from a vector source by substring matching."""
def _densify_polygon(poly, target_spacing):
"""Return evenly spaced points along a polygon's exterior by arc-length.
Args:
poly: shapely Polygon
target_spacing: target arc-length spacing between seeds (density goal)
Returns:
list[(x, y)] -- open list (first point not repeated at end)"""
def _polygonal_intersection(a, b, buffer_eps):
"""Returns only the polygonal portion of a ∩ b. If the intersection is line-like or point-like, it buffers slightly to form a polygon.
Args:
a (Polygon): Input geometries.
b (Polygon): Input geometries.
buffer_eps (float): Small buffer distance to 'inflate' line/point intersections.
Returns:
Polygon or MultiPolygon"""
def _compute_centerline(a, b, min_point_spacing, min_cut_length, debug_logs, crs, debug_vectors_path):
"""Computes a Voronoi-based centerline between two overlapping polygons.
Args:
a (Polygon): First polygon.
b (Polygon): Second polygon.
min_point_spacing (float): Minimum spacing between seed points for Voronoi generation.
min_cut_length (float): Minimum segment length to include in the centerline graph.
debug_logs (bool, optional): If True, prints debug information; default is False.
crs (optional): Coordinate reference system used for optional debug output.
debug_vectors_path (optional): Path to save debug Voronoi cells; if None, skips saving.
Returns:
LineString: Shortest centerline path computed through the Voronoi diagram of the overlap."""
def _segment_emp(emp, cuts, debug_logs):
"""Segments an EMP polygon by sequentially applying centerline cuts, retaining the piece containing the centroid.
Args:
emp (Polygon): The original EMP polygon to segment.
cuts (List[LineString]): List of cutlines to apply.
debug_logs (bool, optional): If True, prints debug info; default is False.
Returns:
Polygon: The segmented portion of the EMP containing the original centroid."""
def _save_intersection_points(a, b, path, crs, pair_id):
"""Saves intersection points between the boundaries of two polygons to a GeoPackage layer.
Args:
a (Polygon): First polygon.
b (Polygon): Second polygon.
path (str): Path to the output GeoPackage file.
crs: Coordinate reference system for the output.
pair_id (str): Identifier for the polygon pair, saved as an attribute.
Returns:
None"""
def _save_voronoi_cells(voronoi_cells, path, crs, layer_name):
"""Saves Voronoi polygon geometries to a specified GeoPackage layer.
Args:
voronoi_cells (GeometryCollection): Collection of Voronoi polygon geometries.
path (str): Path to the output GeoPackage file.
crs: Coordinate reference system for the output layer.
layer_name (str, optional): Name of the layer to write; default is "voronoi_cells".
Returns:
None"""
def _save_emp_outlines(emps, image_paths, path, crs, image_field_name, layer_name):
"""Save initial EMP polygons (one per image) to a GPKG layer."""
def _save_seed_points(pts, path, crs, layer_name):
"""Saves Voronoi seed points to a GeoPackage layer.
Args:
pts (list[tuple]): List of (x, y) seed coordinates.
path (str): Path to the output GeoPackage.
crs: Coordinate reference system.
layer_name (str, optional): Layer name. Defaults to 'voronoi_seeds'."""
def _emp_polygon_from_image(path, eight_connected):
"""Extract the largest valid EMP polygon from a raster mask using GDAL.
Args:
path (str): Path to the input raster file.
eight_connected (bool, optional): Use 8-connectedness for polygonization. Default is True.
Returns:
shapely.geometry.Polygon | ogr.Geometry: The largest EMP polygon."""
def _mask_by_aoi(polygons, aoi_path):
"""Clip polygons by an AOI layer from file.
Args:
polygons (list[Polygon]): Input seamline polygons.
aoi_path (str): Path to vector file containing AOI polygon(s).
Returns:
list[Polygon]: List of clipped polygons (empties dropped)."""
### File: pif/pif.py
def _resolve_pair_output_path(base_path, main_name, reference_name, pair_index, total_pairs):
def _find_overlaps(image_bounds_dict):
def _merge_whole_stat_updates(all_whole_stats, updates):
def _calculate_pair_pif_stats(reference_path, sensed_path, reference_name, sensed_name, num_bands, nodata_value, calculation_dtype, red_band_index, nir_band_index, vegetation_threshold, inz_threshold, region_radius, max_samples, min_samples, feature_method, cache, io_threads, tile_threads, save_inz_path, debug_logs):
def _build_overlap_vrts(reference_path, sensed_path, tmpdir):
def _write_expression_vrt(output_path, sources, expression, width, height, gt, projection, data_type, nodata_value):
def _translate_vrt_to_raster(vrt_path, output_path, output_type, nodata_value):
def _build_valid_mask_raster(ref_vrt, sensed_vrt, width, height, gt, projection, tmpdir):
def _build_inz_stable_mask_raster():
def _reference_seed_points_from_pairs(point_pairs, height, width):
def _read_mask(mask_path):
def _build_seed_mask_raster(seed_points, width, height, gt, projection, radius, tmpdir):
def _combine_masks_raster(stable_mask_path, seed_mask_path, width, height, gt, projection, tmpdir):
def _count_mask_pixels(mask_path):
def _sample_mask_raster(mask_path, max_samples, width, height, gt, projection, tmpdir):
def _masked_band_stats(raster_path, band_index, mask_path):
def flood_from_match_points(input_images):
"""Generate correction parameters using PIFs flooded from matched points.
This follows the main PIF ideas from Kim and Han (2021): use matched points as seeds, remove vegetation-sensitive areas, identify stable pixelswith an integrated normalized Z-score image, grow PIFs around seed points, and fit per-band linear radiometric corrections.
Returns:
np.ndarray: Shape ``(num_bands, 2 * num_images, 1)``. For each image
and band, entries are ``scale`` then ``offset`` such that
``corrected = scale * image + offset``."""
## Markdown Section
### File: index.md
# spectralmatch: relative radiometric normalization toolkit for raster mosaics and time series
[](https://pypi.org/project/spectralmatch/)
[](https://pepy.tech/projects/spectralmatch)
[](https://plugins.qgis.org/plugins/spectralmatch_qgis/)
[](#)
[](https://codecov.io/gh/spectralmatch/spectralmatch)
[](https://ssh.cloud.google.com/cloudshell/editor?cloudshell_git_repo=https://github.com/spectralmatch/spectralmatch&cloudshell_working_dir=.)
[](https://spectralmatch.github.io/spectralmatch/llm_prompt)
[](https://doi.org/10.5281/zenodo.15312878)
[](https://doi.org/10.21105/joss.08974)
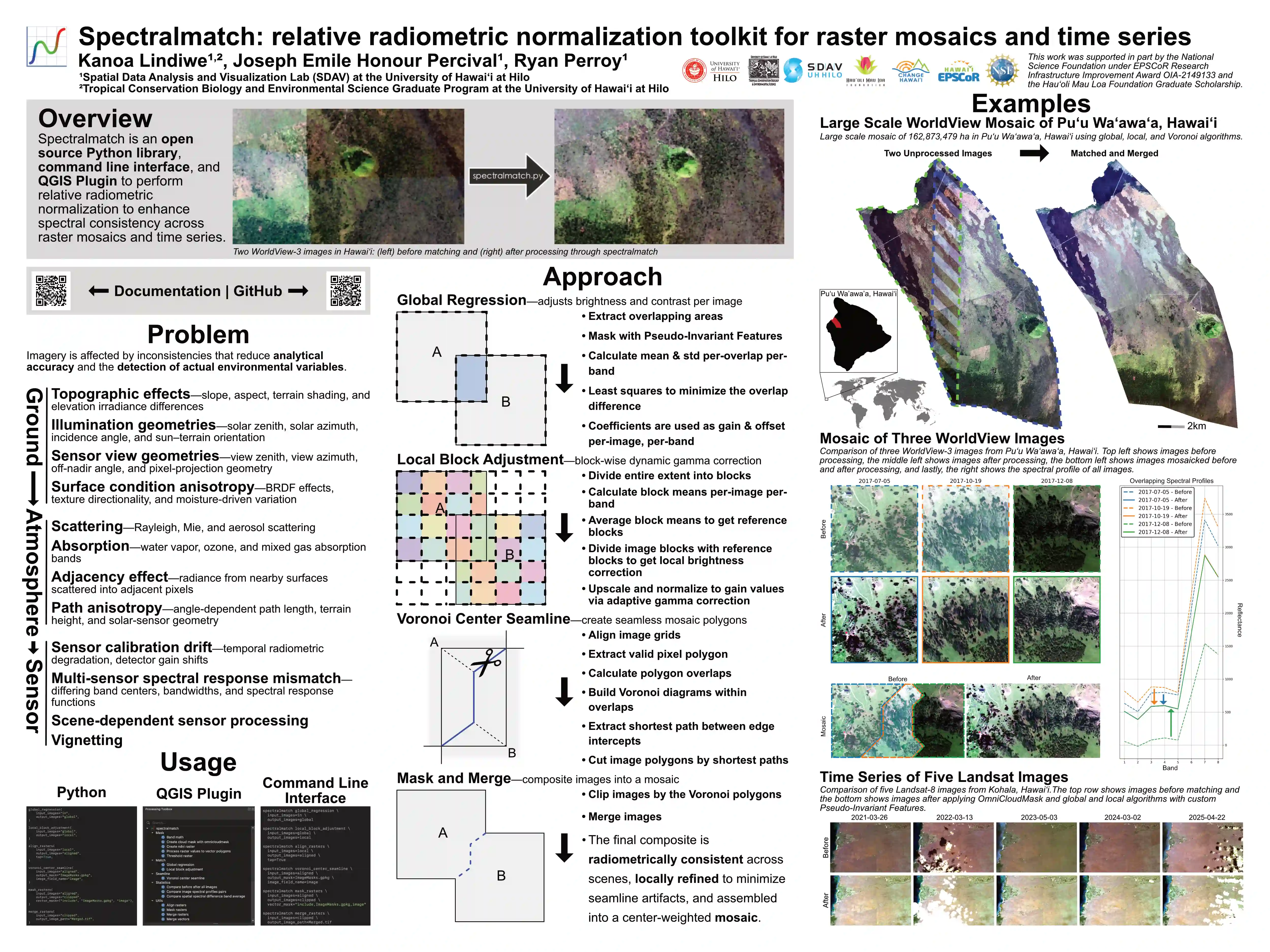
## Overview

Spectralmatch provides algorithms to perform relative radiometric normalization (RRN) to enhance spectral consistency across raster mosaics and time series. It is built for geoscientific use, with a sensor- and unit-agnostic design, optimized for automation and efficiency on arbitrarily many images and bands, and works well with Very High Resolution Imagery (VHRI) as it does not require pixel co-registration. In addition to matching algorithms, the software supports cloud and vegetation masking, pseudo invariant feature (PIF) based exclusion, seamline network generation, raster merging, and plotting statistics. The toolkit is available as an open-source Python library, command line interface, and QGIS plugin.
> Please cite as: Lindiwe et al., (2026). Spectralmatch: relative radiometric normalization toolkit for raster mosaics and time series. Journal of Open Source Software, 11(117), 8974, https://doi.org/10.21105/joss.08974
## Features
- **Automated, Efficient, and Scalable:** Designed for large-scale workflows with no manual steps, leveraging multiprocessing and Cloud Optimized GeoTIFF support for fast, efficient processing across images, windows, and bands.
- **Resumable Processing:** Save image stats and block maps for quicker reprocessing.
- **Integrated Seamline and Cloud Masking:** Generate seamlines and detect clouds within the same workflow.
- **Specify Model Images** Include all or specified images in the matching solution to bring all images to a central tendency or selected images spectral profile.
- **Consistent Multi-image Analysis:** Performs minimal necessary adjustments to achieve inter-image consistency while preserving the original spectral characteristics.
- **Sensor and Unit Agnostic:** Supports optical imagery from handheld cameras, drones, crewed aircraft, and satellites for reliable single sensor and multi-sensor analysis, while preserving spectral integrity across all pixel units—including negative values and reflectance.
- **Enhanced Imagery:** Helpful when performing mosaics and time series analysis by blending large image collections and normalizing them over time, providing consistent, high-quality data for machine learning and other analytical tasks.
- **Open Source and Collaborative:** Free under the MIT License with a modular design that supports community contributions and easy development of new features and workflows. Accessible through a python library, command line interface, and QGIS plugin.
---
## Current Matching Algorithms
### Global to local matching
This method applies least squares regression to estimate scale and offset parameters that align the histograms of all images toward a shared spectral center or specified set of images center. This is achieved by constructing a global model based on the overlapping areas of adjacent images, where the spectral relationships are defined. This global model ensures that each image conforms to a consistent radiometric baseline while preserving overall color fidelity.
However, global correction alone cannot capture intra-image variability so a second local adjustment phase is performed. The overlap areas are divided into smaller blocks, and each block’s mean is used to fine-tune the color correction. This block-wise tuning helps maintain local contrast and reduces visible seams, resulting in seamless and spectrally consistent mosaics with minimal distortion. Pseudo invariant features can be automatically created by aligning image overlaps by [orb](https://docs.opencv.org/4.x/d1/d89/tutorial_py_orb.html) match points and extracting low difference raster values. These methods draw on work from ['An auto-adapting global-to-local color balancing method for optical imagery mosaic' by Yu et al](https://doi.org/10.1016/j.isprsjprs.2017.08.002), ['Integrated Preprocessing of Multitemporal Very-High-Resolution Satellite Images via Conjugate Points-Based Pseudo-Invariant Feature Extraction' by Taeheon Kim and Youkyung Han](https://doi.org/10.3390/rs13193990), and others.
#### Assumptions
- **Consistent Spectral Profile:** The true spectral response of overlapping areas remains the same throughout the images.
- **Least Squares Modeling:** A least squares approach can effectively model and fit all images' spectral profiles.
- **Scale and Offset Adjustment:** Applying scale and offset corrections can effectively harmonize images.
- **Minimized Color Differences:** The best color correction is achieved when color differences are minimized.
- **Geometric Alignment:** Images are assumed to be geometrically aligned with known relative positions via a geotransform. However, they only need to be roughly aligned as pixel co-registration is not required.
- **Global Consistency:** Overlapping color differences are consistent across the entire image.
- **Local Adjustments:** Block-level color differences result from the global application of adjustments.
---
## Installation
> For additional installation instructions see the [Installation Methods](https://spectralmatch.github.io/spectralmatch/installation/) in the docs.
### Installation as a QGIS Plugin
In the [QGIS](https://qgis.org/download/) plugin manager, install 'spectralmatch' and find it in the Processing Toolbox.
### Installation as a Python Library and CLI
Ensure you have the following system-level prerequisites: `Python ≥ 3.10 and ≤ 3.12`, `pip`, `PROJ ≥ 9.3`, and `GDAL ≥ 3.11`; then use pip to install the library:
| conda create -n spectralmatch python=3.12 "gdal>=3.11" "proj>=9.3" -c conda-forge
conda activate spectralmatch
pip install spectralmatch
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48 | import os
from spectralmatch import (
Match,
Seamline,
align_rasters,
mask_rasters,
merge_rasters,
)
working_directory = "/path/to/working/directory"
input_folder = os.path.join(working_directory, "Input")
global_folder = os.path.join(working_directory, "GlobalMatch")
local_folder = os.path.join(working_directory, "LocalMatch")
aligned_folder = os.path.join(working_directory, "Aligned")
clipped_folder = os.path.join(working_directory, "Clipped")
Match.global_regression(
input_images=input_folder,
output_images=global_folder,
)
Match.local_block_adjustment(
input_images=global_folder,
output_images=local_folder,
)
align_rasters(
input_images=local_folder,
output_images=aligned_folder,
tap=True,
)
Seamline.voronoi(
input_images=aligned_folder,
output_mask=os.path.join(working_directory, "ImageMasks.gpkg"),
image_field_name="image",
)
mask_rasters(
input_images=aligned_folder,
output_images=clipped_folder,
vector_mask=("include", os.path.join(working_directory, "ImageMasks.gpkg"), "image"),
)
merge_rasters(
input_images=clipped_folder,
output_image_path=os.path.join(working_directory, "MergedImage.tif"),
)
|
| spectralmatch pipeline /input/folder /output/file.tif --shared_debug_logs=True
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20 | {
"image_name": {
"adjustments": {
"band_0": {"scale": float, "offset": float},
...
},
"whole_stats": {
"band_0": {"mean": float, "std": float, "size": int},
...
},
"overlap_stats": {
"other_image": {
"band_0": {"mean": float, "std": float, "size": int},
...
},
...
}
},
...
}
|
| spectralmatch COMMAND --help
|
| spectralmatch Match global_regression --help
|
| spectralmatch COMMAND [OPTIONS]
|
| spectralmatch Match global_regression [OPTIONS]
spectralmatch Match local_block_adjustment [OPTIONS]
spectralmatch Seamline voronoi [OPTIONS]
spectralmatch Pif flood_from_match_points [OPTIONS]
|
| spectralmatch pipeline /input/folder /output/file.tif --shared_debug_logs=True
|
1
2
3
4
5
6
7
8
9
10
11
12
13 | # Params
input_name # For example: input_images
input_name # For example: output_images
# Types
SearchFolderOrListFiles = str | List[str] # Required
CreateInFolderOrListFiles = str | List[str] # Required
# Resolve
input_image_paths = _resolve_paths("search", input_images, kwargs={"default_file_pattern":"*.tif"})
output_image_paths = _resolve_paths("create", output_images, kwargs={"paths_or_bases":input_image_paths, "default_file_pattern":"$_Global.tif"})
image_names = _resolve_paths("name", input_image_paths)
# This pattern can also be used with other input types like vectors
|
| # Param
custom_output_dtype
# Type
CustomOutputDtype = str | None # Default: None
# Resolve
output_dtype = _resolve_output_dtype(input_image_paths[0], custom_output_dtype)
|
| # Param
custom_nodata_value
# Type
CustomNodataValue = float | int | None # Default: None
# Resolve
nodata_value = _resolve_nodata_value(input_image_paths[0], custom_nodata_value)
|
| # Param
debug_logs
# Type
DebugLogs = bool # Default: False
# No resolve function necessary
|
| # Param
vector_mask
# Type
VectorMask = Tuple[Literal["include", "exclude"], str, Optional[str]] | None
# No resolve function necessary
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31 | # Params
cache
image_threads
io_threads
tile_threads
# Types
Threads = Literal["cpu"] | int | None
Cache = float | None
# Resolve
_set_gdal_cache(cache, debug_logs)
_set_gdal_workers(io_threads, debug_logs)
image_backend = "thread" # "thread" or "process"
image_threads_on, image_thread_workers = _resolve_parallel_config(image_threads)
tile_thread_on, tile_thread_workers = _resolve_parallel_config(tile_threads)
# Main process example
image_args = [(tile_thread_on, tile_thread_workers, other_args, ...) for arg in inputs]
if image_threads_on:
with _get_executor(image_backend, image_thread_workers) as executor:
futures = [executor.submit(_name_process_image, *args) for args in image_args]
for future in as_completed(futures):
future.result()
else:
for args in image_args:
_name_process_image(*args)
def _name_process_image(tile_thread_on, tile_thread_workers, other_args, ...):
# Process image
|
| # Param
window_size
# Types
WindowSize = int | None
# Resolve within image process if possible
window_size = _resolve_window_size(window_size, input_image_path, debug_logs)
|
| # Param
SaveAsCog = bool # Default: True
# Type
SaveAsCog = bool # Default: True
# No resolve function necessary
|
| # Validate params example
Universal._validate(
input_images=input_images,
output_images=output_images,
vector_mask=vector_mask,
)
Match._validate_match(
specify_model_images=specify_model_images,
)
|
| make version version=1.2.3
|
| pre-commit install
pre-commit run --all-files
|
| make test-file path=path/to/folder_or_file
|
| make qgis-build # Build QGIS plugin
make python-build # Build python library
|
| conda create -n spectralmatch python=3.12 "gdal>=3.11" "proj>=9.3" -c conda-forge
conda activate spectralmatch
|
| pip install spectralmatch
|
| pixi init myproject
cd myproject
pixi add "python>=3.9,<3.13" "gdal>=3.11"
pixi add spectralmatch --pypi
|
| git clone https://github.com/spectralmatch/spectralmatch.git
cd spectralmatch
|
| conda create -n spectralmatch python=3.12 "gdal>=3.11" "proj>=9.3" -c conda-forge
conda activate spectralmatch
|
| pip install . # Normal dependencies
pip install -e ".[dev]" # Developer dependencies
pip install -e ".[docs]" # Documentation dependencies
pip install -e ".[qgis-build]" # Build qgis plugin
|